DARPA Robotics Challenge Finals: Rules and Course

The DARPA Robotics Challenge Finals is all about the course: the sequence of eight tasks that the robots are going to try to complete in 60 minutes or less. We’ll take a look at each one of the tasks, and go through all the rules that the robots are going to have to follow as they make it through to vicory.
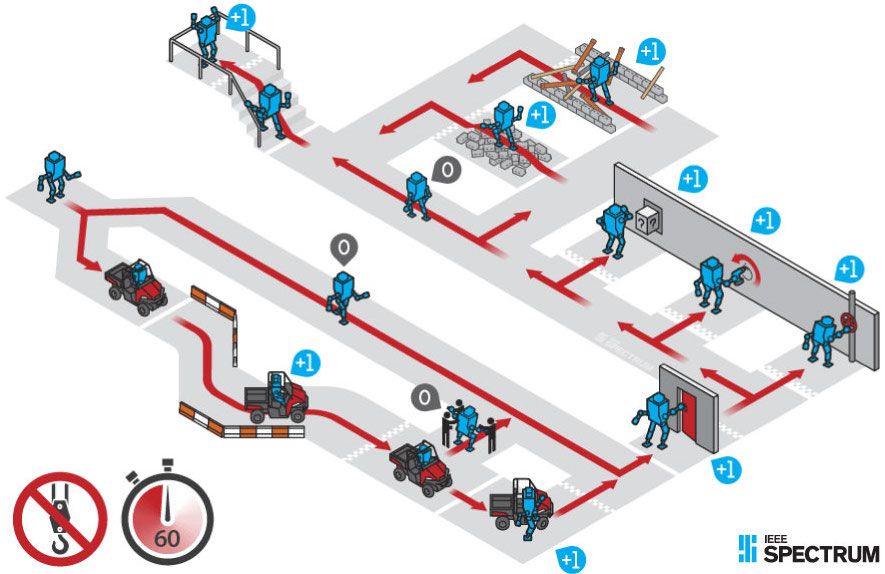
Illustration: James Provost & Erik VrielinkDRC Finals Tasks. Click to embiggen.
The Course
DARPA is running four courses simultaneously. They’re all identical, just with different color branding on them: yellow, green, red, and blue. The courses are spread out in a line along the front of the grandstands at Fairplex, so that spectators have a great view of what’s going on. If there’s any way you can make it here, it’ll be totally worth your time.

Relative to the course at the DRC Trials, the DRC Finals course has been fun-sized. Everything is shorter and more compact. Instead of three doors, there’s one door. Instead of two giant hills of rough terrain, there’s one little patch. Instead of a steep flight of stairs, there’s just a few at a gentle slope. This was almost certainly necessary to make the 60 minute time limit realistic, and it means that we’re a lot more optimistic about robots scoring points and getting to the end.
The upshot of a more forgiving course is that it changes the strategy that teams are going to use while competing. Since it’s reasonable to expect that a bunch of teams will probably score eight points (we saw several complete the entire course during test runs on Thursday), our guess is that most teams will go for a solid, stately eight points on Friday, and then crank things up to “risky” to see how low of a time they can clock in on Saturday.
The driving and egress take place at the beginning of the course, and the rubble and stairs take place at the end. For the “indoor” tasks (rubble, valve, wall, and surprise), the robot can complete them in any order, and each task can be stopped in the middle or skipped without penalty.
Drive Task

Robots start the course inside a running Polaris Ranger XP 900, which teams are allowed to slightly modify (a maximum of five minutes with no tools) to help their robots operate the vehicle. Pretty much every team has done this to give their robots places to grip.
To drive, the robot has to operate the accelerator and steer, and most teams seem to be braking by just not accelerating very much. Robots must sense and avoid the barriers, forcing them to steer at least a little bit. They score a point when the vehicle completely crosses the finish line without having hit anything.
Any robot may instead walk along the driving portion of the course. It won’t score any points if it does this, and it’ll have to walk or wheel or whatever along some pretty unfriendly loose dirt.
Egress Task

Egress just means getting out of the vehicle, and this is probably the most difficult part of the entire DRC Finals course, because the robot has to extricate itself from a complicated driving position and then transfer its weight and balance to outside of the vehicle. We’re expecting to see lots of creativity here, and it’s one of the more likely places for a robot to fall. Robots are not required to put the vehicle in park first, but as DARPA comments, it “would be prudent.”
Door Task

The door is 33 inches wide inside, has a lever handle, and can be pushed open after the handle is rotated. There’s no threshold; it’s a flat surface under the door.
Valve Task

The valve is between 10cm and 40cm in diameter, and gets turned counterclockwise. A full rotation earns a point.
Wall Task

The wall task is really the drill task. Robots will have access to two different kinds of drills, and there are two of each, on two different shelves. They’re cordless, fully charged, and have not been modified to make them easier for a robot to turn on. Once a robot grabs a drill and gets it working, it’ll turn to a piece of 1/2 inch thick drywall with a circle painted on it. The goal is to cut out the circle without cutting any of the drywall outside of the circle, and if the robot is successful in doing this, it gets a point, even if it drops the drill onto the concrete, which is what all the robots are doing immediately after they’re done.
Surprise Task

The surprise task is a small box mounted on a wall. There’s something in the box that the robot will have to manipulate. Today, it was a button, and we’ve heard that it could also be an electrical breaker switch, but it’ll change between Friday and Saturday. Activating whatever is in the box gets a point.
Rubble Task

Rubble covers both the terrain and debris tasks from the DRC Trials. Robots get to choose whether they want to deal with terrain or deal with debris, but they can only earn one point for the task, so doing both for a bonus point isn’t an option. Note that there’s nothing in the rules that says that robots can’t just bulldoze the debris out of their way without moving any of it by hand, so expect any robots that are capable of this to do it.
Stairs Task

Climbing the stairs and ending up with all contact points of the robot on or above the top step scores a point and signals the end of the run.
Challenge Rules
Time – Robots have 60 minutes to complete the course, from the start of the drive to the top of the stairs. Each robot goes through the entire course twice, once on Friday and once on Saturday.
Communications – There’s no communication between the humans interacting with the robot (controlling it) and the humans watching the robot do the tasks. The only way for the robot drivers to know what’s going on is to rely on the robot’s sensors. If the wireless connectivity is bad (and it will be deliberately messed with by DARPA), the teams will have to work around it.
Falling – There are no safety belays. If the robot falls, it’ll have to deal with that on its own, ideally by not smashing itself into bits and being able to get up.
Resets – If a robot falls and can’t get up on its own, teams may request a reset. If they do, they can go in with a belay system and hoist the robot back up again, but they have to move the robot back outside the door again to simulate a situation in which one robot busts and another one has to start from scratch. Teams must spend a minimum of 10 minutes on a reset, and the 60 minute clock continues to run. If a team can get their robot up and running in 2 minutes, they still get a full 10 minute penalty. For what it’s worth, teams are also allowed to plug their robot into a laptop during a reset if they need to tweak firmware or something.
Scoring – Scoring is based first on task completion, and second on time. A robot that completes 8 tasks in 59 minutes will score higher than a robot that completes 7 tasks in 1 minute (although we’d very much like to see that). If two robots complete the same number of tasks, the faster one comes out on top. The final score for each robot is taken from their best run.



